

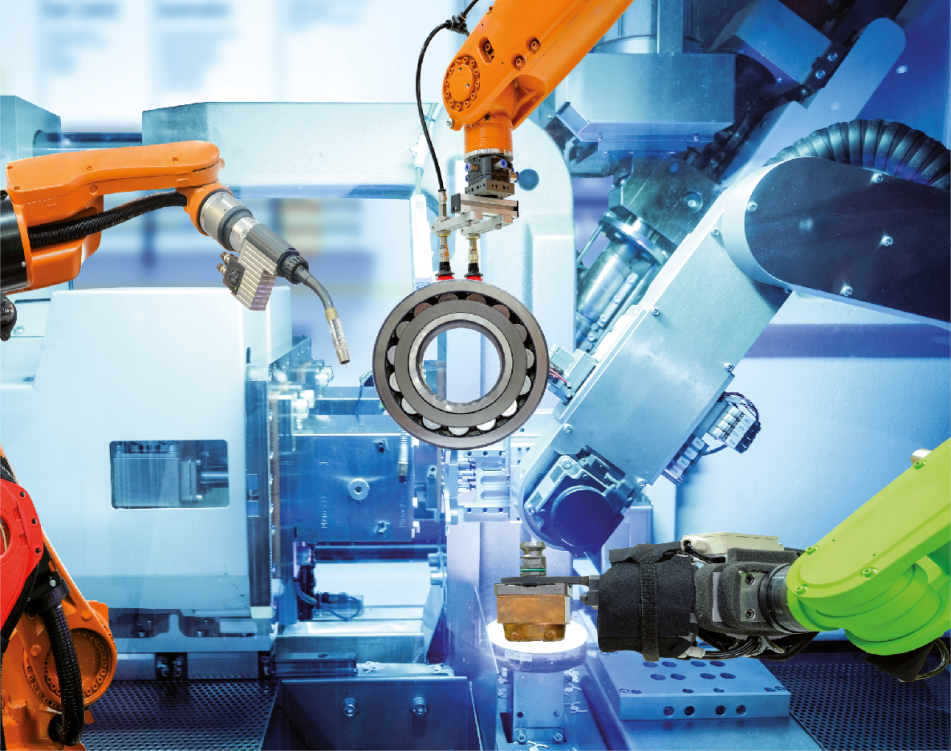
Robótica guiada por visão
Identificação da posição e orientação de objectos com envio das coordenadas para o robot.
Características:
- Reconstrução tridimensional
- Localização 3D
- Calibração entre o robot e o sistema de visão
- Comunicação com PLC e/ou robot
- Integração de vários sensores 3D num sistema
Aplicações:
- Bin picking
- Picking de tapete – Pick and Place
- Correção de posições
- Despaletização
- Montagem
- Rebitagem
- Aparafusamento
Inteligência artificial baseada em deep learning
Aporta soluções a aplicações de visão complexas que anteriormente não eram viáveis de solucionar com ferramentas tradicionais de análise e processamento de imagem.
Características:
- Aquisição de imagens e etiquetagem
- Treino do modelo
- Validação do modelo
- Implementação do modelo
Aplicações:
- Classificação
- Deteção de objetos com orientação
- Deteção de defeitos complexos
- Deteção de anomalias
- Verificação da montagem de componentes
- Leitura de caracteres com problemas de impressão

Visão 3D
Caracterização e inspeção de objetos a partir da sua informação tridimensional.
Tecnologias de aquisição de imagem 3D:
- Triangulação laser
- Frindge projection
- Visão estéreo
- Tempo de voo
Aplicações:
- Controlo da qualidade dimensional
- Inspeção de superfícies
- OCR 3D
- Inspeção da montagem de componentes
- Otimização volumétrica
- Correlação do objeto com o respetivo CAD
Desenvolvimento de soluções de visão à medida
Desenvolvimento de soluções à medida
Tecnologias:
- Reconhecimento de padrões
- Classificação
- Medição
- OCR/OCV
- Análise de blobs
- Leitura de códigos (Barras, Datamatrix, Qr, …)
- Inspeção
Aplicações:
- Medição
- Controlo de qualidade
- Rastreabilidade
- Controlo de aparência
- Controlo de etiquetagem


Software industrial
- Desenvolvimento de soluções de rastreabilidade
- Monitorização de processos
- Registo de informações do processo
- Criação de relatórios


